
А вот такой контроллер управления ШД http://item.taobao.com/item.htm?id=12251978866 можно подключить к ардуине?
Просто нужен контроллер для ШД на 3А
Подробно; http://translate.google.com/translat...asp%3Fpid%3D28
Показано с 81 по 90 из 93
-
12.05.2012, 01:04 #81Продвинутый


- Регистрация
- 20.12.2011
- Сообщений
- 336
- Вес репутации
- 225
 Re: Управление шаговым двигателем
Re: Управление шаговым двигателем
Последний раз редактировалось kadushkin; 12.05.2012 в 01:06.
-
12.05.2012, 01:35 #82Администратор

- Регистрация
- 08.06.2007
- Возраст
- 54
- Сообщений
- 13,380
- Вес репутации
- 10
Re: Управление шаговым двигателем
3А это максимальное значение для этого контроллера
-
12.05.2012, 02:05 #83Продвинутый
- Регистрация
- 20.12.2011
- Сообщений
- 336
- Вес репутации
- 225
Re: Управление шаговым двигателем
Ну а принципиально такой контроллер к ардуине можно подключить без проблем?
И я так думаю этот контроллер контролирует силу тока и в случае чего не сгорит. Или как?
-
12.05.2012, 03:09 #84Администратор
- Регистрация
- 08.06.2007
- Возраст
- 54
- Сообщений
- 13,380
- Вес репутации
- 10
Re: Управление шаговым двигателем
Если судить по параметрам, то можно.
-
27.03.2013, 22:29 #85Новичок
- Регистрация
- 27.03.2013
- Сообщений
- 1
- Вес репутации
- 0
Re: Управление шаговым двигателем
Добрый вечер.
Нужна помощь.
Есть интеллектуальные линзы хелла. На них на шторке стоит шаговый двигатель четырехконтактный. Нашел в интернете видео но схем нет. Может кто подскажет где можно готовый купить?
Вот видео как она должна работать http://www.youtube.com/watch?v=WQC-uHTOMSU
-
28.03.2013, 02:40 #86Администратор
- Регистрация
- 08.06.2007
- Возраст
- 54
- Сообщений
- 13,380
- Вес репутации
- 10
Re: Управление шаговым двигателем
Если 4-х контактный то возможно что там биполярник.
Есть возможность прозвонить обмотки шаговика?Последний раз редактировалось Chip; 28.03.2013 в 08:04.
-
27.06.2013, 17:59 #87Новичок
- Регистрация
- 27.06.2013
- Сообщений
- 1
- Вес репутации
- 0
Re: Управление шаговым двигателем
Друзья не могу найти для arduino скетч для управления драйвером и выводом оборотов на индикатор LCD.
По сути мне надо генератор управляемый 2 кнопками частота больше меньше и вывод на индикатор LCD оборотов, как пример 100 гц (подбирается опытным путем для меня точность не принципиально) 1 оборот, можно третью кнопку enable.
Профессионалы Ардуинцы помогите прошу Вас сотворить сие чудо. Я только учусь программированием не когда не занимался.
-
06.03.2016, 01:08 #88Продвинутый
- Регистрация
- 20.12.2011
- Сообщений
- 336
- Вес репутации
- 225
Re: Управление шаговым двигателем
Контроллер двух двигателей постоянного тока Qik 2s12v10 можно использовать для управления шаговиком?
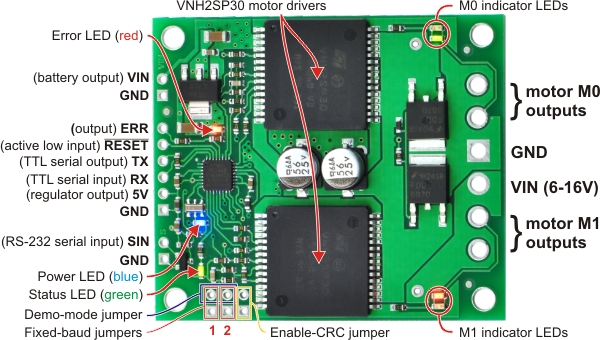
https://www.pololu.com/docs/0J29/all
-
07.03.2016, 02:57 #89Администратор
- Регистрация
- 08.06.2007
- Возраст
- 54
- Сообщений
- 13,380
- Вес репутации
- 10
Re: Управление шаговым двигателем
Можно, только в полношаговом режиме и без функции удержания в нужном положении
Последний раз редактировалось Chip; 07.03.2016 в 22:11.
-
07.03.2016, 10:25 #90Продвинутый
- Регистрация
- 20.12.2011
- Сообщений
- 336
- Вес репутации
- 225
Re: Управление шаговым двигателем
Этот контроллер имеет несколько фиксированных режимов:
0 = 7-bit resolution, high-frequency (PWM frequency of 19.7 kHz, which is ultrasonic)
1 = 8-bit resolution, high-frequency (PWM frequency of 9.8 kHz)
2 = 7-bit resolution, medium-frequency (PWM frequency of 2.5 kHz)
3 = 8-bit resolution, medium-frequency (PWM frequency of 1.2 kHz)
4 = 7-bit resolution, low-frequency (PWM frequency of 310 Hz)
5 = 8-bit resolution, low-frequency (PWM frequency of 150 Hz)
Подключил обмотки ШД к М0 и М1 - двигатель шагает как-то нестабильно и медленно.
Вот два скетча, п оразному организованы, но результат тот же:
Код:#include <SoftwareSerial.h> #include <PololuQik.h> PololuQik2s12v10 qik(12, 13, 7); void setup() { qik.init(); //qik.setConfigurationParameter(1,0); qik.setConfigurationParameter(10,0); qik.setConfigurationParameter(11,0); Serial.begin(115200); } void loop() { // 1 1 0 1 0 // 2 0 1 1 0 // 3 0 1 0 1 // 4 1 0 0 1 qik.setM0Speed(127); //10 qik.setM1Speed(127); //10 delay(40); qik.setM0Speed(-127); //01 qik.setM1Speed(127); //10 delay(40); qik.setM0Speed(-127); //01 qik.setM1Speed(-127); //01 delay(40); qik.setM0Speed(127); //10 qik.setM1Speed(-127);//01 delay(40); }
Код:#include <MsTimer2.h> #include <SoftwareSerial.h> #include <PololuQik.h> PololuQik2s12v10 qik(19, 18,7); void setup() { MsTimer2::set(100, flash); MsTimer2::start(); Serial.begin(115200); qik.init(); qik.setConfigurationParameter(1,0); // qik.setConfigurationParameter(10,0); qik.setConfigurationParameter(11,0); } void loop() {} unsigned int phase=0; void flash() { Serial.println(phase); if (phase==0) { qik.setM0Speed(127); //10 qik.setM1Speed(127); //10 } if (phase==1) { qik.setM0Speed(-127); //01 qik.setM1Speed(127); //10 } if (phase==2) { qik.setM0Speed(-127); //01 qik.setM1Speed(-127); //01 } if (phase==3) { qik.setM0Speed(127); //10 qik.setM1Speed(-127);//01 } phase++; if(phase>3) {phase=0;} //qik.setM0Speed(0); //0 //qik.setM1Speed(0);//0 }

 Ответить с цитированием
Ответить с цитированием
Информация о теме
Пользователи, просматривающие эту тему
Эту тему просматривают: 1 (пользователей: 0 , гостей: 1)
