

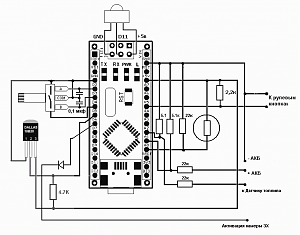
Объединил в один скетч для arduino: ИК-Пульт, Управление рулевыми кнопками, Энкодер, Авто регулировка яркости, Активатор камеры ЗХ, Задержка включения камеры ЗХ , измерение напряжения, измерение уровня топлива.
Не нужные функции можно закоментировать в главном цикле loop
Улучшеный скетч от echo
Внимание
Программа работает на прямую с драйвером USB-Моста FT232
аналоги arduino с другими преобразователями com to usb работать не будут
СхемаPHP код://http://compcar.ru
#include <IRremote.h>
byte bytes[13]; // 0-3 байт энкодер, рулевые кнопки, ИК приемник, веб камера
// 4 байт датчик света
// 5 байт датчик напряжения
// 6 байт датчик топлива
// 7-12 зарезервированы
int LIGHT_SENS = 0 ; // Вход датчика освещености
int VOLT_SENS = 1 ; // Вход датчика напряжения
int FUEL_SENS = 2 ; // Вход датчика уровня топлива
int JOYSTIK_PIN = 5 ; // Вход для рулевых Кнопок
int NC2_SENS = 4 ; // Вход датчика
int NC1_SENS = 5 ; // Вход датчика
int NC3_SENS = 6 ; // Вход датчика
int NC4_SENS = 7 ; // Вход датчика
int RECV_PIN = 11; //вход ИК приемника
int back_cam = 6; //Вход активации камера заднего вида
int temperature = 5; //Вход датчика температуры
int encoder0PinA = 2 ; //Вывод А энкодера
int encoder0PinB = 3 ; //Вывод В энкодера
int encoder_botton = 4; //Вход кнопки энкодера
unsigned long res_dt, ir_dt, old_ir, time;
byte temp, cam_status;
IRrecv irrecv(RECV_PIN);
decode_results results;
//******************************************
void setup()
{
pinMode(encoder0PinA, INPUT);
digitalWrite(encoder0PinA, HIGH); // подключить подтягивающий резистор
pinMode(encoder0PinB, INPUT);
digitalWrite(encoder0PinB, HIGH); // подключить подтягивающий резистор
pinMode(encoder_botton, INPUT);
digitalWrite(encoder_botton, HIGH); // подключить подтягивающий резистор
pinMode(back_cam, INPUT);
digitalWrite(back_cam, HIGH); // подключить подтягивающий резистор
attachInterrupt(0, doEncoderA, FALLING); // настроить прерывание interrupt 0 на pin 2
attachInterrupt(1, doEncoderB, FALLING); // настроить прерывание interrupt 0 на pin 3
Serial.begin(115200); // настроить скорость com порт
irrecv.enableIRIn(); // включить приемник
}
//******************************************
void loop()
{
IR_resiver();
joystik();
cam();
if ((millis()-time)>1000 && results.value ==0) //запуск процедур по таймеру
{
time = millis();
autolight();
fuel();
voltmetr();
}
}
//*******************ИК приемник***********************
void IR_resiver()
{
if ((millis()-time)>1000 )
{
time = millis();
results.value=0;
}
if (irrecv.decode(&results))
{
if (results.value > 0 && results.value < 0xFFFFFFFF)
{
ir_dt = results.value;
bytes[0] = ir_dt & 0xFF; // преобразовать в 4-байта
bytes[1] = (ir_dt & 0xFF00) >> 8;
bytes[2] = (ir_dt & 0xFF0000) >> 16;
bytes[3] = (ir_dt & 0xFF000000) >> 24;
Serial.write( bytes,13); // отправить прочитаное значение компьютеру
if (old_ir == ir_dt){delay(300);} // Пауза после нажатия и удержания(перед повторами)
else {delay(500);}
old_ir = ir_dt;
}
if (results.value == 0xFFFFFFFF )
{
delay(130); //пауза между повторами
Serial.write( bytes,13);
}
irrecv.resume();
}
}
//****************резистивные кнопки**************************
void joystik()
{
res_dt = analogRead(JOYSTIK_PIN); // прочитать данные АЦП
if( res_dt < 1023 && results.value == 0)
{
delay(50); // пауза для проверки дребезга
if(res_dt == analogRead(JOYSTIK_PIN)) //если нет дребезга
{
bytes[0] = res_dt & 255; // преобразовать в 2-байта
bytes[1] = (res_dt & 768) >> 8;
bytes[2] = 0;
bytes[3] = 0;
Serial.write( bytes,13); // отправить прочитаное значение компьютеру
delay(250); // Пауза между нажатиями
}
}
}
//******************Датчик освещения************************
void autolight()
{
byte light;
byte sens = analogRead(LIGHT_SENS)/4;
if ((sens > 0) && (sens<30)) {light = 2;}
if ((sens > 30) && (sens<60)) {light = 60;}
if ((sens > 60) && (sens<90)) {light = 90;}
if ((sens > 90) && (sens<120)) {light = 120;}
if ((sens > 120) && (sens<150)) {light = 150;}
if ((sens > 150) && (sens<190)) {light = 190;}
if (sens > 190) {light = 255;}
if(light != bytes[4]) // если были изменения
{
clear_buf();
bytes[4] = light;
Serial.write( bytes,13);
}
}
//*******************Измерение Напряжения***********************
void voltmetr()
{
temp = analogRead(VOLT_SENS)/4;
if(temp != bytes[5])
{
clear_buf();
bytes[5]=temp;
Serial.write( bytes,13);
}
}
//*******************Датчик топлива***********************
void fuel()
{
temp = analogRead(FUEL_SENS)/4;
if(temp != bytes[6])
{
clear_buf();
bytes[6]=temp;
Serial.write( bytes,13);
}
}
//*******************Активация веб камеры по сигналу ЗХ***********************
void cam()
{
temp=digitalRead(back_cam);
if(temp==HIGH && cam_status==0)
{
clear_buf();
cam_status=255;
bytes[1]=8;
Serial.write( bytes,13);
}
if(temp==LOW && cam_status==255)
{
clear_buf();
cam_status=0;
bytes[1]= 9;
Serial.write( bytes,13);
}
}
//*******************Активация веб камеры по сигналу ЗХ***********************
void clear_buf()
{
bytes[0] = 0;
bytes[1] = 0;
bytes[2] = 0;
bytes[3] = 0;
}
//*******************обработка прерывания***********************
void doEncoderA()
{
cli();
if(digitalRead(encoder0PinB)==HIGH){bytes[1]=24;}else{bytes[1]=15;}
bytes[0] = 0;
bytes[2] = 0;
bytes[3] = 0;
Serial.write( bytes,13);
sei();
}
//*******************обработка прерывания***********************
void doEncoderB()
{
cli();
if(digitalRead(encoder0PinA)==HIGH){bytes[1]=15;}else{bytes[1]=24;}
bytes[0] = 0;
bytes[2] = 0;
bytes[3] = 0;
Serial.write( bytes,13);
sei();
}
Показано с 1 по 10 из 200
-
17.11.2009, 02:16 #1Администратор



- Регистрация
- 08.06.2007
- Возраст
- 55
- Сообщений
- 13,381
- Вес репутации
- 10
 Объединенный проект для Arduino, All-In-One.
Объединенный проект для Arduino, All-In-One.
Последний раз редактировалось Chip; 20.03.2017 в 00:51.
-
17.11.2009, 03:11 #2Модератор
- Регистрация
- 03.10.2008
- Возраст
- 52
- Сообщений
- 1,041
- Вес репутации
- 456
Re: Начинаю по тихоньку обьеденять в один скетчь.
Мне очень интересно, я тока вчера с кардуиной познакомился, но уже загорелся)). Желательно, чтобы скетч состоял из модулей, которые по желанию можно было убрать, чтобы освободить порты.
Например энкодер и рулевые кнопки одновременно в одном проекте мало кто будет использовать.
Кстати не нашел по форуму кода для задержек камеры ЗХ. Если выкладывал - ткни, плиз.Автозапчасти из Кореи. http://parts-kor.ru
Мой проект Завершен http://compcar.ru/forum/showthread.php?t=2973
-
17.11.2009, 03:14 #3Администратор
- Регистрация
- 08.06.2007
- Возраст
- 55
- Сообщений
- 13,381
- Вес репутации
- 10
Re: Начинаю по тихоньку обьеденять в один скетчь.
Я постараюсь сделать программу на ПК универсальной по максимуму, а скетчи на кардуино всегда подправить можно.
Задержку камеры ЗХ сделаю.
-
17.11.2009, 03:37 #4Модератор
- Регистрация
- 05.05.2008
- Возраст
- 42
- Сообщений
- 829
- Вес репутации
- 404
Re: Начинаю по тихоньку обьеденять в один скетчь.
Это отличная идея. Удалить то что не требуется всегда легче чем вставить. Я уже все прошивки какие буду использовать по отдельности проверил а вот слепить их воедино никак не получается. Осталось только одну прошивку доделать для управления портами Arduino с кнопок руля по I-Bus шине.
хороший модем должен качать пиво!
Мой проект
-
18.11.2009, 00:31 #5Местный
- Регистрация
- 10.07.2009
- Возраст
- 51
- Сообщений
- 152
- Вес репутации
- 242
Re: Начинаю по тихоньку обьеденять в один скетчь.
Chip, еще измерение температуры и вольтметр пожалуйста...
-
05.12.2009, 01:39 #6Продвинутый
- Регистрация
- 08.09.2009
- Возраст
- 43
- Сообщений
- 236
- Вес репутации
- 242
Re: Начинаю по тихоньку обьеденять в один скетчь.
Может энкодер который с нажатием? лишняя кнопочка добавится.
-
05.12.2009, 01:53 #7Администратор
- Регистрация
- 08.06.2007
- Возраст
- 55
- Сообщений
- 13,381
- Вес репутации
- 10
Re: Начинаю по тихоньку обьеденять в один скетчь.
Будет вращение, нажатие, нажатие + вращение
-
05.12.2009, 19:43 #8торпедопек
- Регистрация
- 15.10.2009
- Возраст
- 37
- Сообщений
- 43
- Вес репутации
- 202
Re: Начинаю по тихоньку обьеденять в один скетчь для Carduino.
Предлагаю использовать конструкции #ifdef..#endif - чтобы весь функционал определять в одном месте программы
-
05.12.2009, 20:34 #9Администратор
- Регистрация
- 08.06.2007
- Возраст
- 55
- Сообщений
- 13,381
- Вес репутации
- 10
Re: Начинаю по тихоньку обьеденять в один скетчь для Carduino.
Можно попробовать и #ifdef..#endif использовать.
Последний раз редактировалось Chip; 06.12.2009 в 03:39.
-
06.12.2009, 14:39 #10Новичок
- Регистрация
- 06.12.2009
- Возраст
- 45
- Сообщений
- 5
- Вес репутации
- 193
Re: Объединенный проект для Carduino (Arduino) All-In-One.
У меня такое предложения.
Наверняка у многих уже есть неинтеллектуальные блоки питания... а тут такие возможности. Вот например я планирую управление питанием с использованием carduino, предлагаю добавить код для этого. Гибкое изменение режимов работы под себя - это однозначный плюс.

 Ответить с цитированием
Ответить с цитированием


Информация о теме
Пользователи, просматривающие эту тему
Эту тему просматривают: 1 (пользователей: 0 , гостей: 1)
