



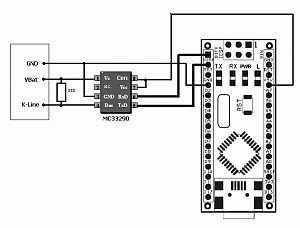
Схему нарисовал, осталось изучить протокол общения с автомобилем и написать прошивку
Искрене надеюсь на вашу помощь.
Для связки компьютера по seral и автомобиля нужно использовать библиотеку SoftwareSerial
Пример работы arduino с софтверным Serial Port:
Пример кода OBD-II терминала для ArduinoPHP код:#include <SoftwareSerial.h>
#define rxPin 3
#define txPin 2
SoftwareSerial mySerial = SoftwareSerial(rxPin, txPin);
byte pinState = 0;
void setup()
{
pinMode(rxPin, INPUT);
pinMode(txPin, OUTPUT);
mySerial.begin(9600);
}
void loop() {
char someChar = mySerial.read();
mySerial.print(someChar);
}
PHP код:#include <SoftwareSerial.h>
#define rxPin 3
#define txPin 2
#define K_IN 0
#define K_OUT 1
#define READ_ATTEMPTS 125
SoftwareSerial mySerial = SoftwareSerial(rxPin, txPin);
char command; //Terminal Commands
char pid_reslen[] = //PID Lengths
{
// pid 0x00 to 0x1F
4,4,2,2,1,1,1,1,1,1,1,1,2,1,1,1,
2,1,1,1,2,2,2,2,2,2,2,2,1,1,1,4,
// pid 0x20 to 0x3F
4,2,2,2,4,4,4,4,4,4,4,4,1,1,1,1,
1,2,2,1,4,4,4,4,4,4,4,4,2,2,2,2,
// pid 0x40 to 0x4E
4,8,2,2,2,1,1,1,1,1,1,1,1,2,2
};
long tempLong;
char str[40];
void setup() {
pinMode(rxPin, INPUT);
pinMode(txPin, OUTPUT);
digitalWrite(txPin, HIGH);
delay(500);
pinMode(K_IN, INPUT);
pinMode(K_OUT, OUTPUT);
pinMode(13, OUTPUT);
mySerial.begin(9600);
mySerial.println("-=Arduino OBD2 Terminal=-");
}
void loop() {
command = mySerial.read();
switch (command) {
case '1':
obdConnect();
break;
case '2':
mySerial.println("MIL Selected");
get_pid(0x01, str, &tempLong);
break;
case '3':
mySerial.println("RPM Selected");
get_pid(0x03, str, &tempLong);
break;
case '4':
mySerial.println("MAF Selected");
get_pid(0x10, str, &tempLong);
break;
}
}
int obdConnect(){
mySerial.println("Attempting ECU initialization...");
if (iso_init() == 0){
mySerial.println("PASS");
return 0;
}
else{
mySerial.println("FAIL");
return 1;
}
}
byte iso_init()
{
byte b;
serial_tx_off(); //disable UART so we can "bit-Bang" the slow init.
serial_rx_off();
delay(3000); //k line should be free of traffic for at least two secconds.
digitalWrite(K_OUT, HIGH); // drive K line high for 300ms
delay(300);
// send 0x33 at 5 bauds
digitalWrite(K_OUT, LOW); // start bit
delay(200);
b=0x33;
for (byte mask = 0x01; mask != 0; mask <<= 1)
{
if (b & mask)
digitalWrite(K_OUT, HIGH);
else
digitalWrite(K_OUT, LOW);
delay(200);
}
digitalWrite(K_OUT, HIGH); // stop bit + 60 ms delay
delay(260);
Serial.begin(10400); // switch now to 10400 bauds
byte i=0; // wait for 0x55 from the ECU (up to 300ms)
while(i<3 && !iso_read_byte(&b)){
i++;
}
mySerial.println(b, BYTE);
if(b != 0x55){
return 1;
}
iso_read_byte(&b);
mySerial.println(b, BYTE); // wait for kw1 and kw2
iso_read_byte(&b);
mySerial.println(b, BYTE);
iso_write_byte(~b); // send ~kw2 (invert of last keyword)
iso_read_byte(&b);
mySerial.println(b, BYTE); // ECU answer by 0xCC (~0x33)
if(b!=0xCC)
return 1;
return 0;
}
void serial_rx_off() {
UCSR0B &= ~(_BV(RXEN0));
}
void serial_tx_off() {
UCSR0B &= ~(_BV(TXEN0));
delay(20); //allow time for buffers to flush
}
void serial_rx_on() {
Serial.begin(10400);
}
boolean iso_read_byte(byte * b)
{
int readData;
boolean success = true;
byte t=0;
while(t != READ_ATTEMPTS && (readData=Serial.read())==-1) {
delay(1);
t++;
}
if (t>=READ_ATTEMPTS) {
success = false;
}
if (success)
{
*b = (byte) readData;
}
return success;
}
void iso_write_byte(byte b)
{
serial_rx_off();
Serial.print(b);
delay(10);
serial_rx_on();
}
byte iso_checksum(byte *data, byte len)
{
byte i;
byte crc;
crc=0;
for(i=0; i<len; i++)
crc=crc+data[i];
return crc;
}
byte iso_write_data(byte *data, byte len)
{
byte i, n;
byte buf[20];
// ISO header
buf[0]=0x68;
buf[1]=0x6A; // 0x68 0x6A is an OBD-II request
buf[2]=0xF1; // our requesterХs address (off-board tool)
// append message
for(i=0; i<len; i++)
buf[i+3]=data[i];
// calculate checksum
i+=3;
buf[i]=iso_checksum(buf, i);
// send char one by one
n=i+1;
for(i=0; i<n; i++)
{
iso_write_byte(buf[i]);
}
return 0;
}
// read n byte(s) of data (+ header + cmd and crc)
// return the count of bytes of message (includes all data in message)
byte iso_read_data(byte *data, byte len)
{
byte i;
byte buf[20];
byte dataSize = 0;
for(i=0; i<len+6; i++)
{
if (iso_read_byte(buf+i))
{
dataSize++;
}
}
memcpy(data, buf+5, len);
delay(55); //guarantee 55 ms pause between requests
return dataSize;
}
boolean get_pid(byte pid, char *retbuf, long *ret)
{
byte cmd[2]; // to send the command
byte buf[10]; // to receive the result
byte reslen = pid_reslen[pid]; // receive length depends on pid
cmd[0]=0x01; // ISO cmd 1, get PID
cmd[1]=pid;
iso_write_data(cmd, 2); // send command, length 2
if (!iso_read_data(buf, reslen)) // read requested length, n bytes received in buf
{
mySerial.println("ISO Read Data Error.");
return false;
}
*ret=buf[0]*256U+buf[1]; // a lot of formulas are the same so calculate a default return value here
mySerial.print("Return Value ");
mySerial.print(pid, DEC);
mySerial.print(" : ");
mySerial.println(*ret);
return true;
}
Показано с 1 по 10 из 64
Комбинированный просмотр
-
03.10.2009, 02:01 #1Администратор



- Регистрация
- 08.06.2007
- Возраст
- 55
- Сообщений
- 13,381
- Вес репутации
- 10
 OBD-II диагностика на Arduino
OBD-II диагностика на Arduino
Последний раз редактировалось Chip; 19.03.2017 в 02:29.
-
05.10.2009, 15:57 #2Продвинутый
- Регистрация
- 11.01.2008
- Сообщений
- 492
- Вес репутации
- 314
Re: OBD-II диагностика на Carduino (Arduino)
я так понял, что порт один...
Т.е. через него будет и связь с машиной, и связь с компом?X-Trail,2010
i5 Intel 3.5" board, DC-DC PS, 4G, W8.1x64, iCar, CityG.

-
05.10.2009, 17:14 #3Администратор
- Регистрация
- 08.06.2007
- Возраст
- 55
- Сообщений
- 13,381
- Вес репутации
- 10
Re: OBD-II диагностика на Carduino (Arduino)
Нет не один, используется библиотека софтового Serial Port <SoftwareSerial.h>
А хардверный порт так и остается , просто в примере он не используетсяПоследний раз редактировалось Chip; 05.10.2009 в 17:54.
-
05.10.2009, 17:53 #4Продвинутый
- Регистрация
- 11.01.2008
- Сообщений
- 492
- Вес репутации
- 314
Re: OBD-II диагностика на Carduino (Arduino)
ясно, я думал, эта библиотека от хардового, хотя название ее говорит само за себя
 X-Trail,2010
X-Trail,2010
i5 Intel 3.5" board, DC-DC PS, 4G, W8.1x64, iCar, CityG.
-
20.10.2009, 11:00 #5Новичок
- Регистрация
- 02.09.2009
- Возраст
- 41
- Сообщений
- 1
- Вес репутации
- 0
Re: OBD-II диагностика на Carduino (Arduino)
mySerial используется для связи с компьютером? если да тогда почему судя по картинке она подключена к машине
это + картинка показывают работу с машиной,Код:#define rxPin 3 #define txPin 2 ... SoftwareSerial mySerial = SoftwareSerial(rxPin, txPin);
а вот здесь
вроде как связь с ком портом компьютера, т.е. ожидание какой номер команды введут скажем в гипертерминале, или я что-то не так понял?Код:void loop() { command = mySerial.read(); switch (command) { case '1': obdConnect(); break; case '2': mySerial.println("MIL Selected"); get_pid(0x01, str, &tempLong); break; case '3': mySerial.println("RPM Selected"); get_pid(0x03, str, &tempLong); break; case '4': mySerial.println("MAF Selected"); get_pid(0x10, str, &tempLong); break; } }Последний раз редактировалось MariMax; 20.10.2009 в 11:05.
-
25.02.2011, 18:36 #6Новичок
- Регистрация
- 23.02.2011
- Возраст
- 42
- Сообщений
- 6
- Вес репутации
- 178
 Re: OBD-II диагностика на Carduino (Arduino)
Так никто и не ответил
Re: OBD-II диагностика на Carduino (Arduino)
Так никто и не ответил Сообщение от MariMax
Сообщение от MariMax

-
03.02.2010, 21:59 #7Новичок
- Регистрация
- 16.06.2009
- Сообщений
- 4
- Вес репутации
- 0
Re: OBD-II диагностика на Carduino (Arduino)
коллеги, а кто-нибудь эту тему дальше развивал?
есть мысль читать через CAN-шину сообщения от подрулевых переключателей.
вообще, пока нашёл только один(!) похожий проект:
http://code.google.com/p/opengauge/w/list
-
18.04.2010, 21:25 #8Пользователь
- Регистрация
- 29.11.2009
- Возраст
- 50
- Сообщений
- 65
- Вес репутации
- 205
Re: OBD-II диагностика на Carduino (Arduino)
Сообщение от softic
http://code.google.com/p/multidisplay/D945GCLF2,160gb,2gb-ram,8" TFT LCDTouch+2lcd7" ,Bt,WiFi,SILABS,OBD2,DVBT, ,Audioson,Hertz,Fokal
-
30.11.2010, 14:33 #9Местный
- Регистрация
- 10.11.2010
- Сообщений
- 144
- Вес репутации
- 209
Re: OBD-II диагностика на Carduino (Arduino)
Кто-нибудь попробовал? Сообщение от Chip
-
01.12.2010, 22:00 #10Новичок
- Регистрация
- 01.12.2010
- Возраст
- 57
- Сообщений
- 6
- Вес репутации
- 181
Re: OBD-II диагностика на Carduino (Arduino)
На японца праворукова начну пробовать, как придет индикатор 16х2, через неделю. На Duino. Будет железячный вариант. Валентин 8080 помоги с пидами, плиз.
Последний раз редактировалось Noid; 01.12.2010 в 22:11. Причина: синтаксис

 Ответить с цитированием
Ответить с цитированием

Информация о теме
Пользователи, просматривающие эту тему
Эту тему просматривают: 1 (пользователей: 0 , гостей: 1)
