

Микросхема питается однополярным источником, но только 30в
Показано с 41 по 50 из 69
-
27.01.2013, 03:32 #41Администратор



- Регистрация
- 08.06.2007
- Возраст
- 56
- Сообщений
- 13,381
- Вес репутации
- 10
 Re: Управление полным приводом
Re: Управление полным приводом
-
27.01.2013, 04:11 #42Продвинутый
- Регистрация
- 20.12.2011
- Сообщений
- 336
- Вес репутации
- 246
Re: Управление полным приводом
Да нет, я не про питание. Я про подключение индуктивного датчика. Если только один вход подключить?
-
27.01.2013, 11:04 #43Администратор
- Регистрация
- 08.06.2007
- Возраст
- 56
- Сообщений
- 13,381
- Вес репутации
- 10
Re: Управление полным приводом
Ф разве детчики в штатной системе не подключены к земле?
-
27.01.2013, 13:24 #44Продвинутый
- Регистрация
- 20.12.2011
- Сообщений
- 336
- Вес репутации
- 246
Re: Управление полным приводом
Дело в том, что я подключаюсь в параллель с блоком АБС (к одному и тому же датчику) и там этот датчик наверняка сидит на земле, просто не хочу давать повода блоку АБС для ложных срабатываний, тем более, что он проверяет датчик на КЗ, анализируя прохождение контрольного напряжения через датчик 2,9В. А посадив в своей приблуде датчик на землю, я рискую подсунуть блоку АБС неверную информацию, хотя может это и не так.
Последний раз редактировалось kadushkin; 27.01.2013 в 14:22.
-
29.01.2013, 14:57 #45Местный
- Регистрация
- 10.11.2010
- Сообщений
- 144
- Вес репутации
- 221
Re: Управление полным приводом
А что говорит омметр про подключение датчика? Сообщение от kadushkin
Сообщение от kadushkin

Хотя если взглянуть строго, то это "вмешательство в тормозную систему" - низзя. Может проще рядом прикрутить ещё один датчик? Придётся, конечно, провода ещё тащить...Последний раз редактировалось edw123; 29.01.2013 в 15:00.
-
02.02.2013, 18:08 #46Продвинутый
- Регистрация
- 20.12.2011
- Сообщений
- 336
- Вес репутации
- 246
Re: Управление полным приводом
Нет это не вариант.
Еще один вопрос по подключению полного привода.
Я подключил электромуфту подключения заднего моста напрямую к 12В, в результате имею распределние крутящего момента 50/50 между мостами.
А нужно управлять скважностью сигнала.
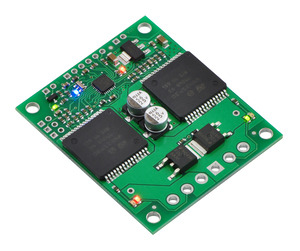
Поскажите если я возьму контроллер управления двигателем (скажем от pololu) постоянного тока, я смогу управлять скважностью?
Муфта потребляет 5А. Имею вот такой контроллер http://www.pololu.com/docs/0J29/all (правда он мне нужен для других целей)
Вот как это реализовано на хундае:

http://www.tucson-club.ru/forum/showthread.php?t=8438
Если для этого лучше использовать другой контроллер, то подскажите куда копать...Последний раз редактировалось kadushkin; 02.02.2013 в 18:15.
-
02.02.2013, 18:30 #47Администратор
- Регистрация
- 08.06.2007
- Возраст
- 56
- Сообщений
- 13,381
- Вес репутации
- 10
Re: Управление полным приводом
Судя по описанию контроллера, он должен легко справляться.
А что мешает проверить?
-
02.02.2013, 18:44 #48Продвинутый
- Регистрация
- 20.12.2011
- Сообщений
- 336
- Вес репутации
- 246
Re: Управление полным приводом
да вобщем-то ничего не мешает...
Ну то есть, примерно так можно управлять
Этот скетч подает 12В на муфту на 2мс, потом 2мс ждет - как на первом графикеКод:/* Required connections between Arduino Mega and qik 2s12v10: Arduino qik 2s12v10 --------------------------- GND - GND Digital Pin 11 - TX Digital Pin 12 - RX Digital Pin 4 - RESET DO NOT connect the 5V output on the Arduino to the 5V output on the qik 2s12v10! */ #include <SoftwareSerial.h> #include <PololuQik.h> PololuQik2s12v10 qik(11, 12, 4); void setup() { qik.init(); } void loop() { qik.setM1Speed(255); //255 = запуск на макс. мощность delay(2); // ждем 2 мс qik.setM1Brake(127); //127 = быстрый останов delay(2); // ждем 2 мс }
На втором графике примерно 4мс, потом 1мс.
Как бы так?Последний раз редактировалось kadushkin; 02.02.2013 в 18:46.
-
03.02.2013, 16:02 #49Продвинутый
- Регистрация
- 20.12.2011
- Сообщений
- 336
- Вес репутации
- 246
Re: Управление полным приводом
Попробовал скетч.
При такой реализации все ресурсы ардуины будут тратиться на создание скважности и других задач уже в скетч не вставишь.
Но pololu можно запрограммировать на частоту 150 и 310Гц, наиболее близких к требуемым 200Гц.
Вот только скважностью видимо управлять тогда не получится.Последний раз редактировалось kadushkin; 03.02.2013 в 16:16.
-
03.02.2013, 19:40 #50Продвинутый
- Регистрация
- 20.12.2011
- Сообщений
- 336
- Вес репутации
- 246
Re: Управление полным приводом
Видимо придется ставить контроллер которому можно по PWM отправить прямоугольные импульсы с нужно скважностью командой analogwrite
типа:

http://www.pololu.com/catalog/product/755
Вот только не ясно, зачем там просят кондер ставить на питание?Последний раз редактировалось kadushkin; 03.02.2013 в 19:43.

 Ответить с цитированием
Ответить с цитированиемИнформация о теме
Пользователи, просматривающие эту тему
Эту тему просматривают: 4 (пользователей: 0 , гостей: 4)
